画像:国立研究開発法人宇宙航空研究開発機構(JAXA)より引用
国立研究開発法人宇宙航空研究開発機構(JAXA)は2026年6月18日、タカラトミー、ソニーグループ、同志社大学と共同で開発した小型月面ロボット「SORA-Q」の研究成果が、国際的な科学雑誌「Science Robotics」に掲載されたと発表しました。
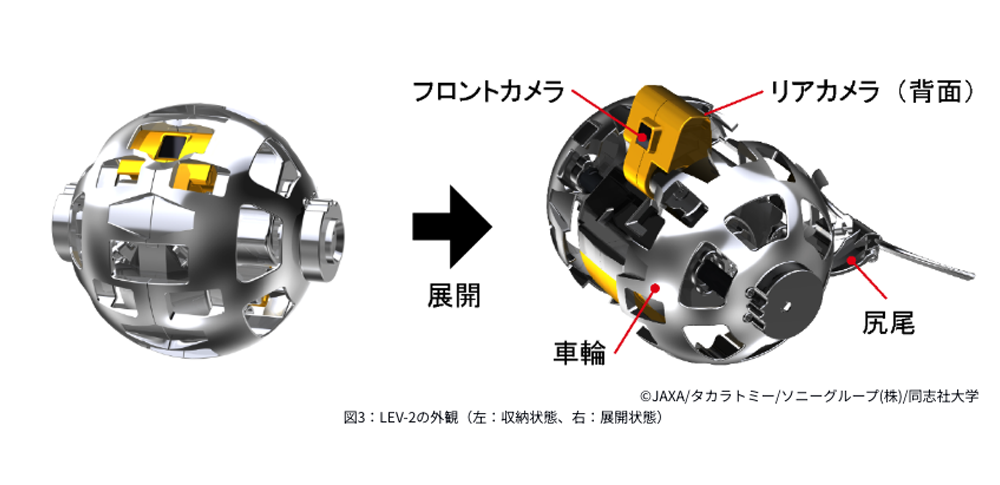
同社らが開発したSORA-Qは、直径約8cmの球体からローバーの形に変形する手のひらサイズの月面探査ロボットです。2024年1月、小型月着陸実証機「SLIM」から分離され、月面に到達。その後、地球からの操作に頼らず、自分で動き、写真を撮影し、データを送ることに成功したとしています。
JAXAらによると、今回の研究では、新たに公開された月面画像などを解析した結果、SORA-Qが月面で実際に移動し、向きを変えていたことが確認されました。また、少なくとも約108分間動作し、画像処理を240回行っていたことも明らかになりました。
月面では通信が途切れるなどの問題もありましたが、SORA-Qは異常を検知して姿勢を直す動きも行っていた、とのこと。今回の成果は、小さく低コストなロボットでも宇宙探査に役立つことを示すもので、今後の月や火星探査への活用が期待されています。
参照変形型月面ロボット「LEV-2」による月面実証成果の国際学術誌「Science Robotics」論文採択|国立研究開発法人宇宙航空研究開発機構(JAXA)